3D Laser Galvo Scan Head China kwa XYZ Axis – GO3D-T





GO3D-T 3 Axis XYZ Dynamic Focusing Laser Galvo Scanner Head kwa Laser Marking na Matumizi mengine.
Kichwa cha kichanganuzi cha leza cha 3D cha GO3-T Series 3D kiko na mhimili wa XYZ.Mhimili wa Z hufanya kazi kama kibadilisha mwelekeo, ambacho kitabadilisha umbali wa kufanya kazi kati ya lenzi ya f-theta na vitu kulingana na urefu wa kitu.Kwa kufanya kazi na kidhibiti cha DLC2-M4-3D na programu ya EZCAD3, usindikaji wa leza kama vile kuweka alama unaweza kufanywa kwa urahisi na kwa ufanisi.
Picha za Bidhaa



Maswali Yanayoulizwa Mara kwa Mara
Utumizi wa kawaida wa skana ya 3D
Kuashiria uso, misaada, kusafisha, muundo wa ukungu, matibabu ya uso.
Utumizi wa kawaida wa skana ya 2D
Kuashiria, usindikaji wa ndege mkondoni, utengenezaji wa nyongeza
Vipimo
| Mfano: | Mfululizo wa GO3D-T | |||||||
| Itifaki | XY2-100 | |||||||
| Kipengele cha Upanuzi wa boriti | 2.0X | 1.67X | 1.85X | |||||
| Kipenyo cha Kuingiza cha XY | 10 mm | 12 mm | 10 mm | 12 mm | 10 mm | 12 mm | ||
| Kipenyo cha Kuingiza | 5.00 mm | 6.00 mm | 5.98mm | 7.18mm | 5.40 mm | 6.48 mm | ||
| Urefu wa mawimbi | GO3-T-355 | GO3D-T-532/1064 | GO3D-T-10600 | |||||
| Itifaki | XY2-100 | |||||||
| Kasi ya Kuashiria | 6000mm/s | |||||||
| Kasi ya Kuweka | 12m/s | 10m/s | 12m/s | 10m/s | 12m/s | 10m/s | 12m/s | 10m/s |
| Uwanja wa Kuashiria | 150*150mm ±35mm na F=254 lenzi | |||||||
| Thamani kubwa zaidi ya Z inaweza kupatikana kwa lenzi kubwa ya F-theta. | ||||||||
| Ugavi wa Nguvu | 15VDC 3A | |||||||
| Uwanja wa Kuashiria | 150*150*±30mm | |||||||
| thamani ya Z zaidi inaweza kufikiwa kwa kutumia lenzi kubwa ya F-theta. | ||||||||
| Utendaji Nguvu | ||||||||
| Wakati wa Hitilafu ya Kufuatilia | 0.22ms | 0.36ms | 0.22ms | 0.36ms | 0.22ms | 0.36ms | 0.22ms | 0.36ms |
| Kuweza kurudiwa | <22uradi | <22uradi | <22uradi | <22uradi | <22uradi | <22uradi | <22uradi | <22uradi |
| Kupata drift | 80ppm/K | 80ppm/K | 80ppm/K | 80ppm/K | 80ppm/K | 80ppm/K | 80ppm/K | 80ppm/K |
| Kukabiliana na kuteleza | 30urad/K | 30urad/K | 30urad/K | 30urad/K | 30urad/K | 30urad/K | 30urad/K | 30urad/K |
| 1% ya kiwango kamili | 0.30ms | 0.40ms | 0.30ms | 0.40ms | 0.30ms | 0.40ms | 0.30ms | 0.40ms |
| 10% ya kiwango kamili | 0.80ms | 1.20ms | 0.80ms | 1.20ms | 0.80ms | 1.20ms | 0.80ms | 1.20ms |
| Isiyo ya Linearity | ◼Mradi 0.9 | ◼Mradi 0.9 | ◼Mradi 0.9 | ◼Mradi 0.9 | ◼Mradi 0.9 | ◼Mradi 0.9 | ◼Mradi 0.9 | ◼Mradi 0.9 |
| Uendeshaji wa muda mrefu zaidi ya masaa 8 | <0.3mrad | <0.3mrad | <0.3mrad | <0.3mrad | <0.3mrad | <0.3mrad | <0.3mrad | <0.3mrad |
| Utendaji wa Macho | ||||||||
| Mkengeuko wa Kawaida | Radi ±0.39 | Radi ±0.39 | Radi ±0.39 | Radi ±0.39 | Radi ±0.39 | Radi ±0.39 | Radi ±0.39 | Radi ±0.39 |
| Hitilafu ya kupata | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 |
| Kupunguza Sifuri | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 | Miradi 5 |
| Joto la Uendeshaji | 10-40 ℃ | 10-40 ℃ | 10-40 ℃ | 10-40 ℃ | 10-40 ℃ | 10-40 ℃ | 10-40 ℃ | 10-40 ℃ |
| Kuhifadhi Joto | -20-60 ℃ | -20-60 ℃ | -20-60 ℃ | -20-60 ℃ | -20-60 ℃ | -20-60 ℃ | -20-60 ℃ | -20-60 ℃ |
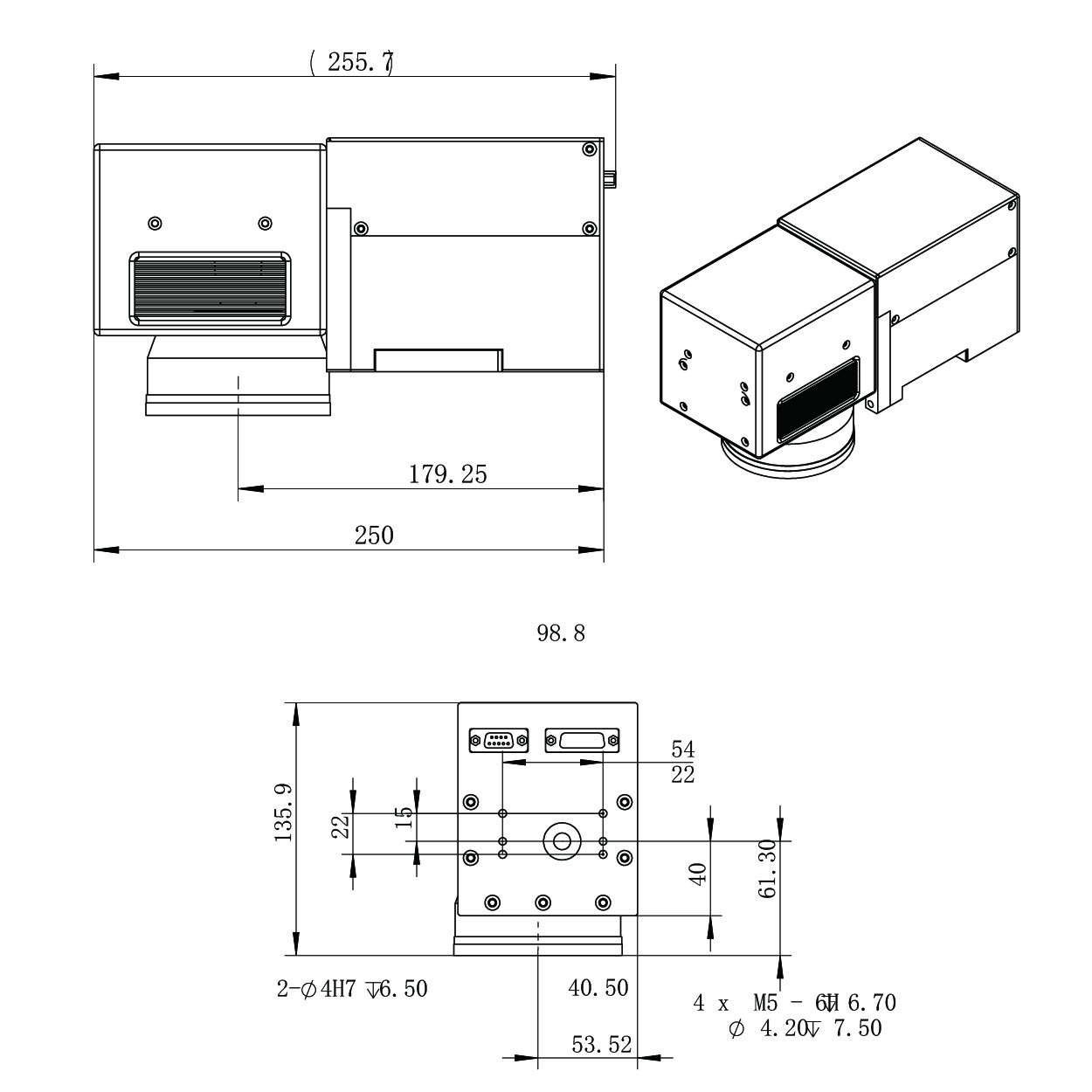
Vipimo vya Bidhaa
Mchoro wa 2D
Mchoro wa 3D
Mchoro wa 2D
Mchoro wa 3D